您好!歡迎訪問上海育仰科教設(shè)備有限公司網(wǎng)站!
全國服務(wù)咨詢熱線:
15216837090
15216837090

 當(dāng)前位置:首頁 > 產(chǎn)品中心 > > 機(jī)械創(chuàng)新實(shí)訓(xùn)設(shè)備 > YUYBD-B機(jī)械系統(tǒng)飛輪調(diào)速創(chuàng)新組合實(shí)驗(yàn)臺
當(dāng)前位置:首頁 > 產(chǎn)品中心 > > 機(jī)械創(chuàng)新實(shí)訓(xùn)設(shè)備 > YUYBD-B機(jī)械系統(tǒng)飛輪調(diào)速創(chuàng)新組合實(shí)驗(yàn)臺

簡要描述:YUYBD-B機(jī)械系統(tǒng)飛輪調(diào)速創(chuàng)新組合實(shí)驗(yàn)臺|機(jī)械創(chuàng)新實(shí)訓(xùn)室設(shè)備實(shí)驗(yàn)臺采用工程應(yīng)用中飛輪調(diào)速Z典型的小型沖床結(jié)構(gòu)為實(shí)驗(yàn)對象,并對其中部件作了創(chuàng)新設(shè)計(jì),設(shè)計(jì)成沖壓力、飛輪慣量可調(diào)、機(jī)組工作阻力模式可變換的創(chuàng)新型組合實(shí)驗(yàn)臺,使實(shí)驗(yàn)測試對象可根據(jù)工作阻力模式進(jìn)行變換。
產(chǎn)品分類
Product Category詳細(xì)介紹
| 品牌 | 育仰科教 | 應(yīng)用領(lǐng)域 | 文體,建材,交通,汽車,綜合 |
|---|
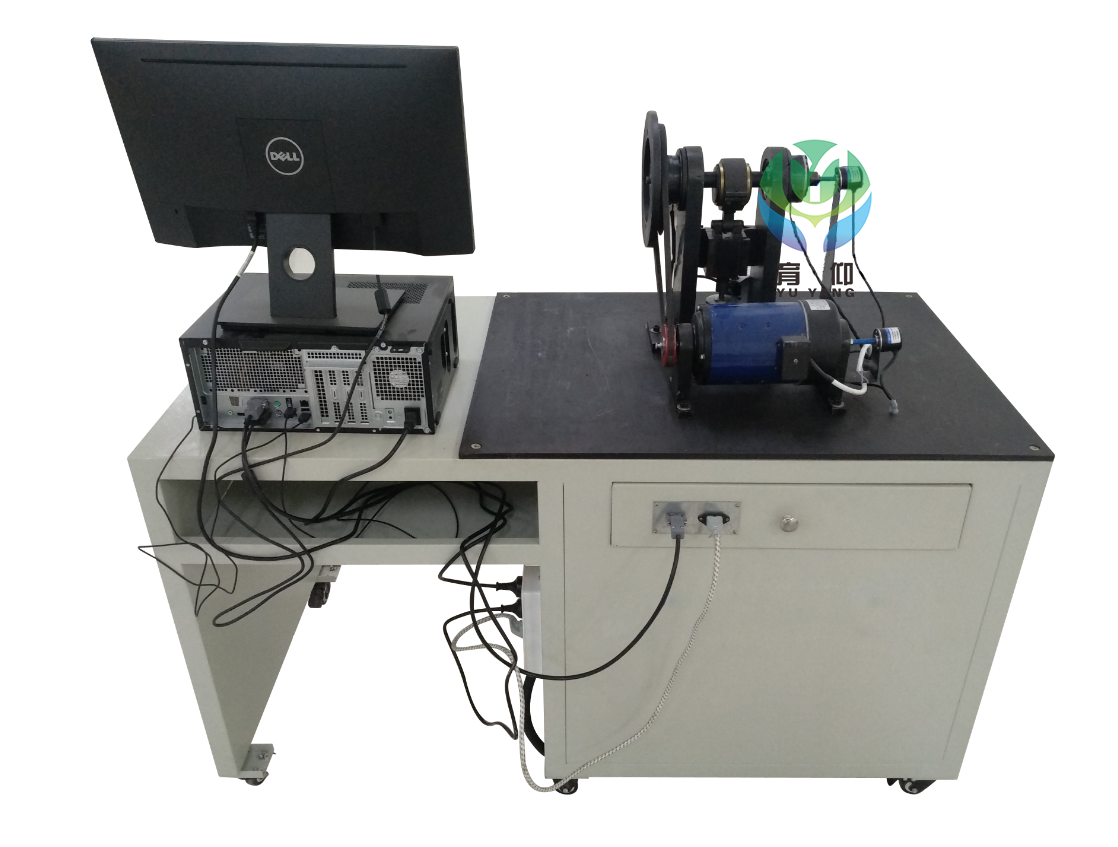
實(shí)驗(yàn)臺采用工程應(yīng)用中飛輪調(diào)速典型的小型沖床結(jié)構(gòu)為實(shí)驗(yàn)對象,并對其中部件作了創(chuàng)新設(shè)計(jì),設(shè)計(jì)成沖壓力、飛輪慣量可調(diào)、機(jī)組工作阻力模式可變換的創(chuàng)新型組合實(shí)驗(yàn)臺,使實(shí)驗(yàn)測試對象可根據(jù)工作阻力模式進(jìn)行變換。在實(shí)驗(yàn)臺上更換幾個簡單零件即可將實(shí)驗(yàn)臺改變機(jī)構(gòu)結(jié)構(gòu)形式,將實(shí)驗(yàn)臺由沖床結(jié)構(gòu)實(shí)驗(yàn)臺轉(zhuǎn)換為壓力機(jī)結(jié)構(gòu)實(shí)驗(yàn)臺,工作阻力形式從沖擊力模式轉(zhuǎn)變?yōu)殡S機(jī)組中曲軸轉(zhuǎn)角成線性變化的壓力變化模式,并可改變沖擊力或壓力變化值。
通過測量飛輪在不同工作阻力模式狀態(tài)下的平穩(wěn)運(yùn)動規(guī)律以及起動、制動特性來分析和研究機(jī)械系統(tǒng)動力學(xué)問題。
機(jī)械系統(tǒng)飛輪調(diào)速創(chuàng)新組合實(shí)驗(yàn)臺實(shí)驗(yàn)內(nèi)容:
1、機(jī)組非工作狀態(tài)穩(wěn)定運(yùn)動速度波動實(shí)驗(yàn):了解光電編碼器工作原理,掌握系統(tǒng)速度波動的測試方法,理解機(jī)組穩(wěn)定運(yùn)轉(zhuǎn)時速度出現(xiàn)周期性波動的原因;
2、機(jī)組工作狀態(tài)運(yùn)動速度波動實(shí)驗(yàn):熟悉機(jī)組運(yùn)轉(zhuǎn)時工作阻力的測試方法,了解動載荷對機(jī)械系統(tǒng)速度波動的影響和原因;
3、機(jī)組起動、制動速度波動測試實(shí)驗(yàn)
1)機(jī)組起動、制動時間測試實(shí)驗(yàn)
2)機(jī)械能大盈虧功的測試及分析計(jì)算實(shí)驗(yàn)
3)機(jī)械速度波動的調(diào)節(jié)實(shí)驗(yàn):改變飛輪大小,觀察機(jī)械速度波動的變化情況,并與理論計(jì)算結(jié)果進(jìn)行比較分析,進(jìn)而掌握周期性速度波動的調(diào)節(jié)方法和設(shè)計(jì)指標(biāo)。利用實(shí)驗(yàn)數(shù)據(jù)計(jì)算飛輪的等效轉(zhuǎn)動慣量,掌握飛輪的設(shè)計(jì)方法設(shè)計(jì)飛輪。
4)曲柄滑塊運(yùn)動學(xué)分析實(shí)驗(yàn);
功能及特點(diǎn):
(1)實(shí)驗(yàn)臺采用工程應(yīng)用中飛輪調(diào)速典型的小型沖床的結(jié)構(gòu),并且機(jī)組工作阻力模式可變換:在實(shí)驗(yàn)臺上更換幾個簡單零件,即可將實(shí)驗(yàn)臺由沖床結(jié)構(gòu)實(shí)驗(yàn)臺轉(zhuǎn)換為壓力機(jī)結(jié)構(gòu)實(shí)驗(yàn)臺,工作阻力形式從沖擊力模式轉(zhuǎn)變?yōu)殡S機(jī)組中曲軸轉(zhuǎn)角成線性變化的壓力變化模式。
(2)沖壓彈簧剛度可變,通過更換沖壓彈簧剛度可改變沖壓力(工作阻力)大小,即改變飛輪調(diào)速的基本參數(shù)之一等效阻力矩大小。
(3)裝有電機(jī)轉(zhuǎn)矩及工作沖壓阻力傳感器:實(shí)驗(yàn)臺上裝有電機(jī)轉(zhuǎn)矩傳感器和沖壓力(工作載荷)傳感器,通過電機(jī)轉(zhuǎn)矩傳感器和沖壓力傳感器,測量得到系統(tǒng)在工作狀態(tài)下的工作阻力矩和電機(jī)驅(qū)動力矩變化規(guī)律及相關(guān)參數(shù),計(jì)算得到系統(tǒng)等效阻力矩及機(jī)械能變化規(guī)律曲線及相關(guān)參數(shù)。求出大盈虧功Wη。
(4)在飛輪主軸上裝有光電編碼器:可精確測量飛輪在起、止動過程中的起動和止動時間;起、制動過程中的速度波動規(guī)律曲線。
(5)使用光電編碼器,可測出系統(tǒng)在穩(wěn)定運(yùn)動過程中的角速度變化規(guī)律、大角速度ωmax、小角速度ωmin、平均角速度ωm及回轉(zhuǎn)不勻率δ值。
(6)實(shí)驗(yàn)臺上飛輪設(shè)計(jì)成飛輪環(huán)形式,可方便拆卸。根據(jù)所測得系統(tǒng)大盈虧功Wy、平均角速度ωm及回轉(zhuǎn)不勻率δ要求,選擇或設(shè)計(jì)制作不同等效轉(zhuǎn)動慣量的飛輪,并在實(shí)驗(yàn)臺上進(jìn)行試驗(yàn)驗(yàn)證,與理論計(jì)算值進(jìn)行比較。
(7)實(shí)驗(yàn)臺設(shè)計(jì)成電機(jī)功率可變,并且裝有電機(jī)轉(zhuǎn)矩傳感器。通過電機(jī)轉(zhuǎn)矩變化規(guī)律及相關(guān)參數(shù)測試;系統(tǒng)起、止動時間及起、制動速度波動測試,可進(jìn)行機(jī)械系統(tǒng)過渡過程的動力學(xué)分析研究。;
主要技術(shù)參數(shù):
(1)沖壓力傳感器量程:0~10000N精度:0.05%
(2)電機(jī)轉(zhuǎn)矩傳感器量程:0~100N精度:0.05%
(3)飛輪角位移傳感器:輸出電壓:0-5V脈沖數(shù):360脈沖/周
(4)電機(jī)額定功率:P=100W
(5)電機(jī)轉(zhuǎn)速:1400r/min
(6)電源:220V交流/50HZ
(7)外形尺寸:860×600×1100mm
(8)重量:90kg
產(chǎn)品咨詢

電話
微信掃一掃